Biography
Hello, I’m Shiva Rudra, a robotics enthusiast with a keen interest in autonomous systems and perception. This page contains few of my projects and articles related to robotics.
Interests
- Robotics
- Autonomous Navigation
- Perception
- SLAM
- Control Systems
Education
B.E. in Electronics and Instrumentation, 2024
BITS Pilani
Minor in Robotics and Automation, 2024
BITS Pilani

Projects
*

The ESDF map is made using pointcloud data from the depth camera and rectified odometry from the VINS framework. Voxfield framework is utilized for this purpose
Designed the control system for translational and jumping motion of a wheeled biped robot. LQR controller is used for translational self balancing motion and PD-fuzzy logic controller is used for jumping motion
Designed and Simulated an underwater ROV control system using PID and LQR controllers and performed a comparative study of both the models
Implemented drone detection using Yolo algorithms and techniques like layer freezing, image augmentation. Performed comparitive study of various scenarios and test cases
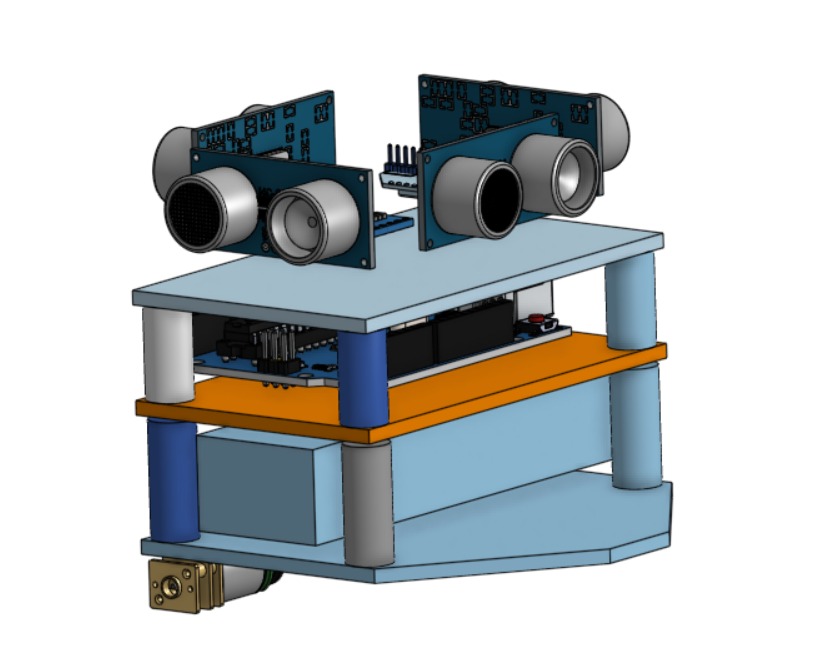
A spherical surveillance bot which can move around get a live video feed of the surroundings
Gallery





Contact
Feel free to reach out to me. I will be thrilled to collaborate or just discuss anything interesting!
- shivarudralolla@gmail.com
- Hyderabad, Telangana
- Follow Me on GitHub
- Let’s Connect on LinkedIn