Implementing ESDF Mapping with VINS
Summary
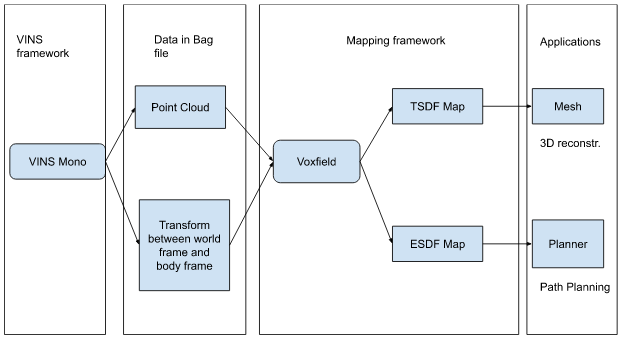
In this work, pointcloud data from the Realsense D455 camera and odometry from VINS estimator module are fed as inputs to the Voxfield mapping framework. Occupancy and ESDF maps are shown in visualization.
Work Pipeline
Results
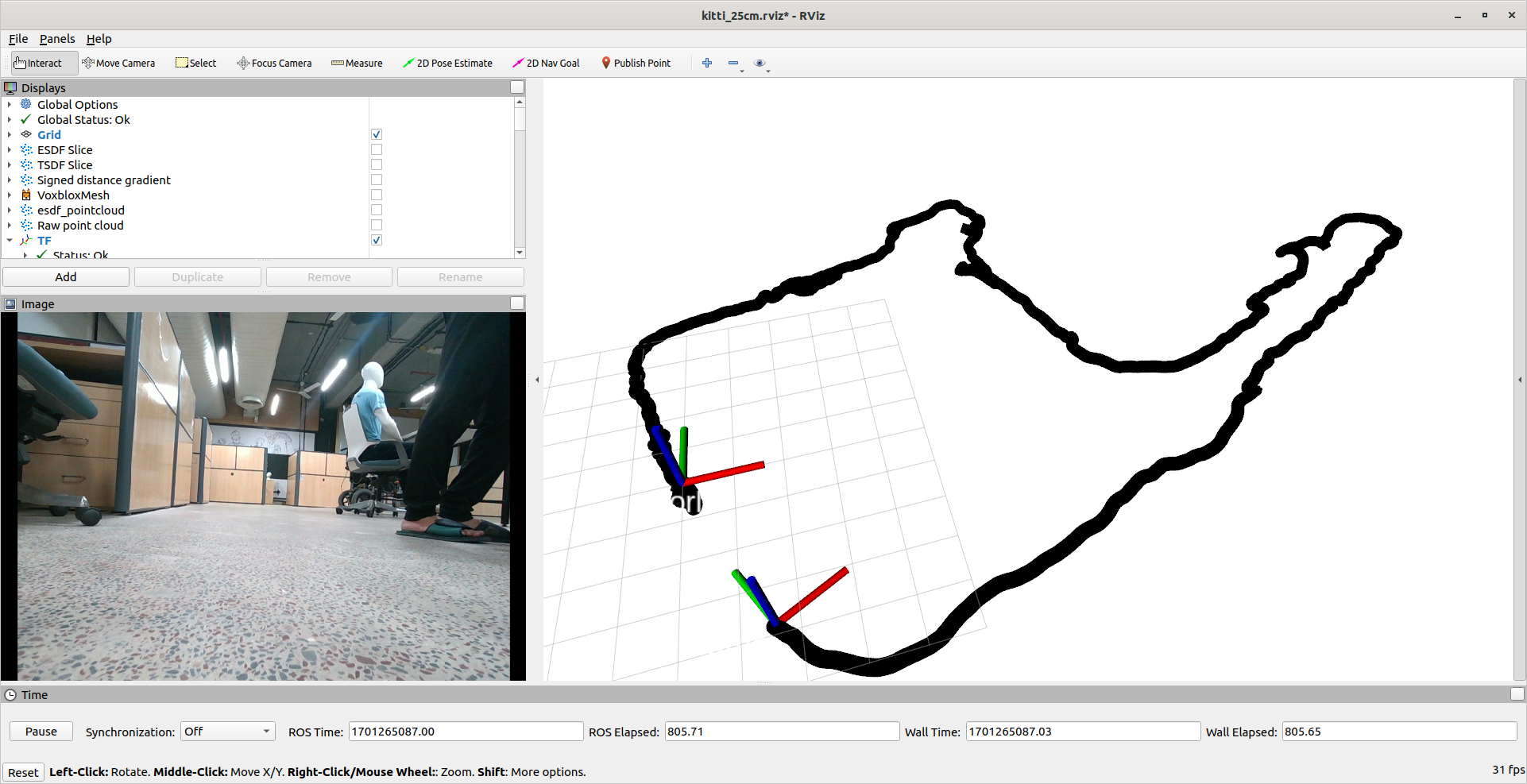
Output of VINS estimator:
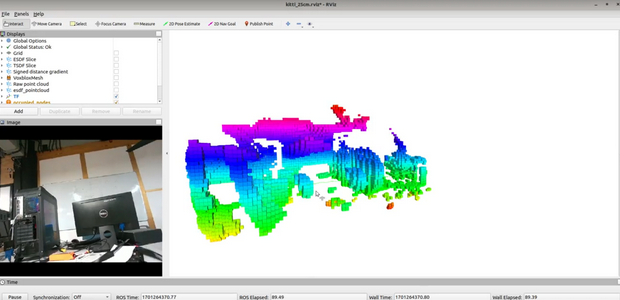
ESDF map for a small region:
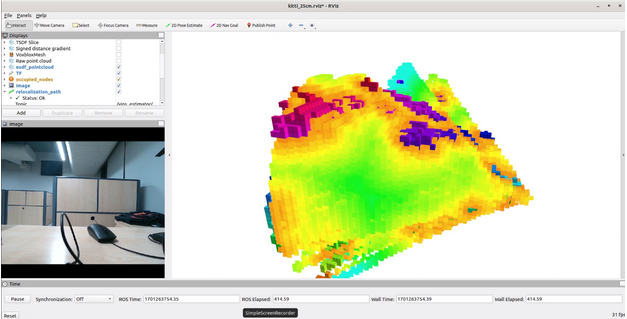
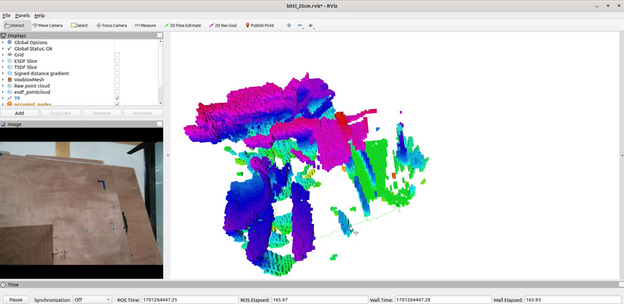
Occupancy map of the lab while implementing VINS:
Video Results:
Shiva Rudra Lolla
Robotics Enthusiast
My research interests include autonomous systems and perception. Drop me a message if you want to connect!