Robotic Arm
| Component Name | Use | Quantity |
|---|---|---|
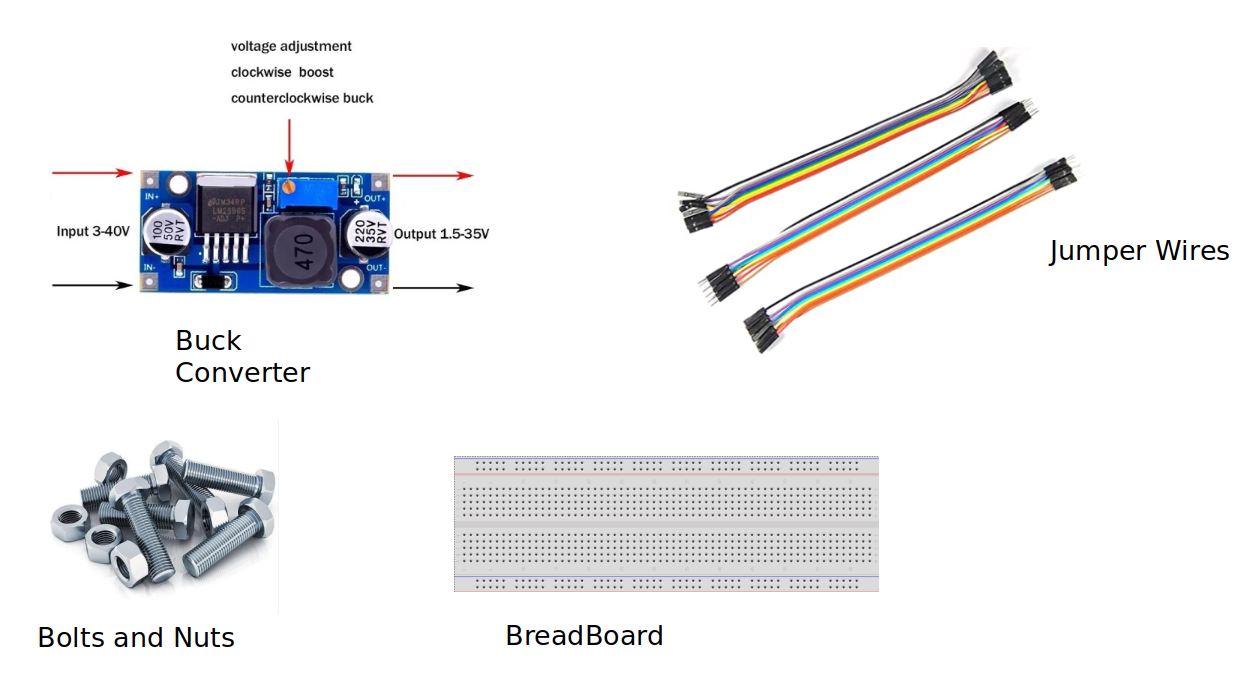
| Buck Converter | Used to step down voltage from 12V to 5V as the operating voltage of the servos is 5-6V | 1 |
| Jumper wires | For making connections | Multiple |
| Screws and Nuts | For Assembly | Multiple |
| Breadboard | For circuit connections | 1 |
| 3D printed parts | For Assembly | Multiple |
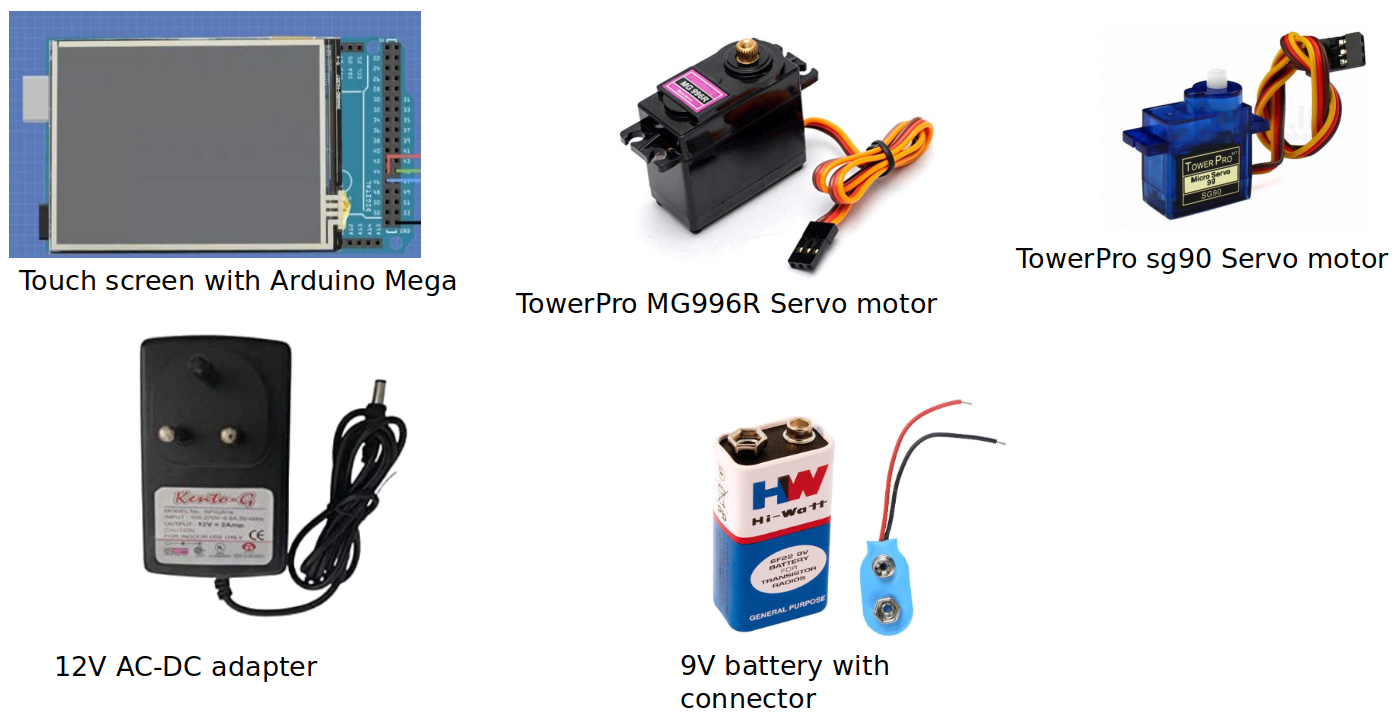
| 3.5" inch ILI9486 TFT Touch Shield LCD Module 480x320 for Arduino Uno | It is the Resistive touch screen module that we used. It comes along with a stylus. | 1 |
| Tower Pro MG996R servo motor | It provides higher torque compared to the smaller servos, so used to actuate larger links like base, waist. | 3 |
| Tower Pro SG90 Servo | Smaller servos are used to actuate smaller links like wrist, gripper. | 3 |
| 12V AC-DC adapter | Used to provide power to the servo motors | 1 |
| 9V batteries | Initially used to power the servos, later were replaced with the adapter. Can be used to power Arduino. | 1-3 |
The components:
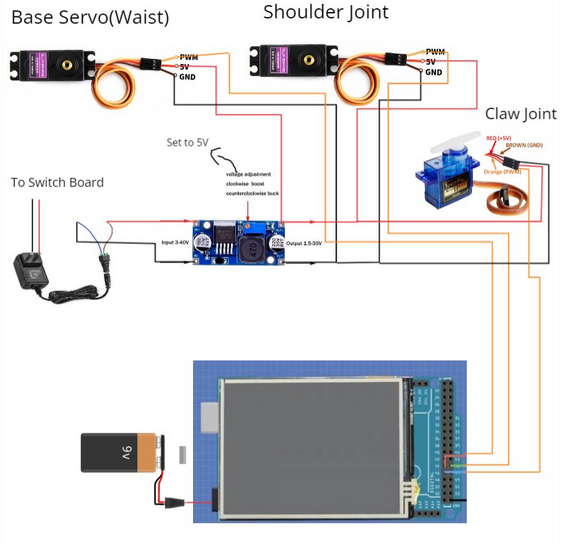
The circuit diagram is as follows:
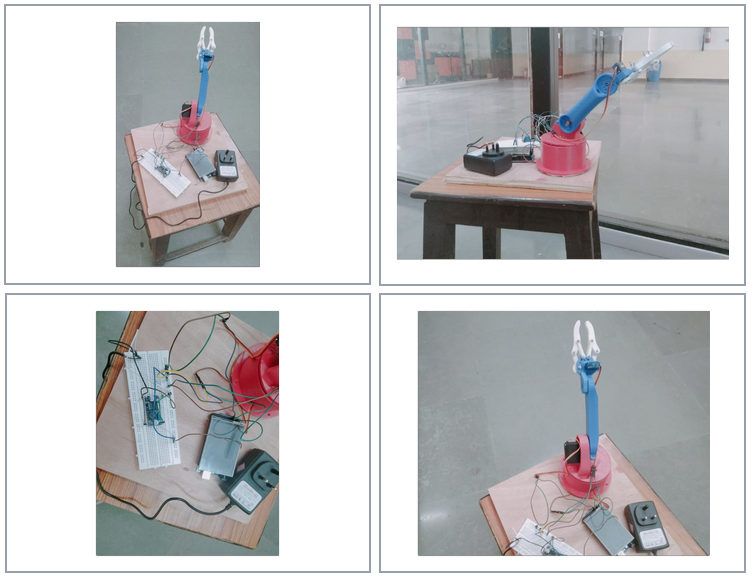
The final assembly is as follows:
The code can be found out in the GitHub Link of this project.
Shiva Rudra Lolla
Robotics Enthusiast
My research interests include autonomous systems and perception. Drop me a message if you want to connect!